교통공학에서의 정지 거리와 정지 시거에 대해서 알아보겠습니다.
정지 거리(Braking distance)란?
인지반응 시간(PRT)동안 진행한 거리를 인지반응 거리(PRD)라고 했습니다. 하지만 인지반응 거리는 운전자가 상황을 인지하고부터 반응을 보이기까지의 시간동안 차량이 이동한 거리이기 때문에 실제로 멈추기까지 이동한 거리라고 볼 수 없습니다. 실제로 멈추기까지 이동한 거리는 인지반응 거리(PRD)와 브레이크를 밟는 순간부터 멈춘 순간까지 진행한 거리를 합한 것이 됩니다. 이때, 브레이크를 밟는 순간부터 멈춘 순간까지 진행한 거리를 정지 거리(Braking distance)라고 합니다.(또는 제동정지거리 라고도 합니다.)
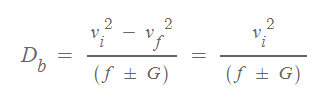
정지 거리의 공식은 다음과 같습니다.

Db = 정지 거리 (m)
vi = 차량 초기 속도 (km/h)
vf = 차량 최종 속도 (km/h)
f = 마찰 계수 (보통 0.35 사용)
G = 경사도
254 = 환산 계수
위의 공식에서, 254은 단위 환산을 위해 적용된 계수입니다. 위의 공식을 적용할 때, 주로 속도는 kph를, 거리는 m를 사용하기 때문에 편의상 위와 같이 표현된 것 입니다. 그리고 가장 오른쪽 공식에서 vf가 없는 이유는, 보통의 경우 차량의 정지 거리를 구할 때, 최종 속도는 0이 되기 때문에 주로 저렇게 표시되기도 합니다.
위와 같이 254를 제외한 공식을 그대로 적용한 후 단위를 맞게 환산해도 같은 결과를 얻게 됩니다.
위의 공식이 어떻게 얻어지는지 증명을 해보겠습니다.
※증명하기에 앞서 다음의 기본적인 속도, 가속도 관계를 알고 있어야 합니다.

여기에서 d=거리, a=가속도를 뜻합니다.
먼저 다음의 그림과 같이 차량이 경사면을 주행하고 있다고 생각해봅니다.(여기서는 내리막)

위의 상황에서 차량에 생기는 마찰력이

가 되게 됩니다.
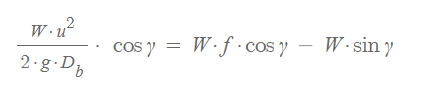
그렇다면 다음의 식이 만들어지게됩니다.

여기서 일정한 가속도로 감속한다고 생각을 하면,

이 나오게 되고, 위의 두 식을 연립하면,

을 얻게 됩니다. 여기서 수평거리인

를 적용하면,
을 얻게 되고, 다음과 같이 식을 변형할 수 있습니다.

최종적으로 다음과 같이 정지 거리의 공식을 얻게 됩니다.

여기에서 +-G가 나오는 이유는, tan의 값이 항상 양수가 나오기 때문인데, 오르막일때는 +G, 내리막일때는 -G로 사용하면 됩니다.
그리고 마찰 계수인 f는 무차원인데, 다음과 같이

의 과정을 통해서 다음과 같이 사용될 수도 있습니다[참고].

(여기서 a'는 AASHTO에서 정한 Standard Deceleration Rate(=3.4m/s^2) 입니다.)
정지 시거(Stop Sight Distance)란?
위의 과정에서 구한 정지 거리와 PRD(인지반응 거리)를 더한 것을 정지 시거(Stop Sight Distance)라고 합니다. 그래서 정지 시거는 운전자가 사건을 인지하고부터 브레이크를 밟고 완전히 멈추거나 그 반응이 끝나는 시점까지 이동한 거리를 뜻하게 됩니다. 다르게 표현하면, 운전자의 차량과 같은 차로 위에 있는 불특정 장애물을 인지하고 안전하게 정지하기 위하여 필요한 거리라고 말할 수 있습니다. 보통은 차로 중심선 1m 높이에서 그 차로 중심선에 있는 높이 15cm의 장애물 맨 윗부분을 볼 수 있는 거리를 그 차로의 중심선을 따라 측정한 거리를 말합니다.
정지 시거(SSD)의 공식은 다음과 같습니다.

'교통공학' 카테고리의 다른 글
| 평면 곡선(수평 곡선, Horizontal Curve) (0) | 2023.07.22 |
|---|---|
| 정지시거(Stop Sight Distance)와 판단시거(Decision Sight Distance) (0) | 2023.07.16 |
| 인지반응 과정과 PRT(Perception Reaction Time) (0) | 2023.07.14 |
| 시력(Vision, Visual Acuity) (0) | 2023.07.13 |
| 이동성(Mobility)과 접근성(Accessbility) (0) | 2023.07.12 |



